| Auszug |
|---|
Checkliste: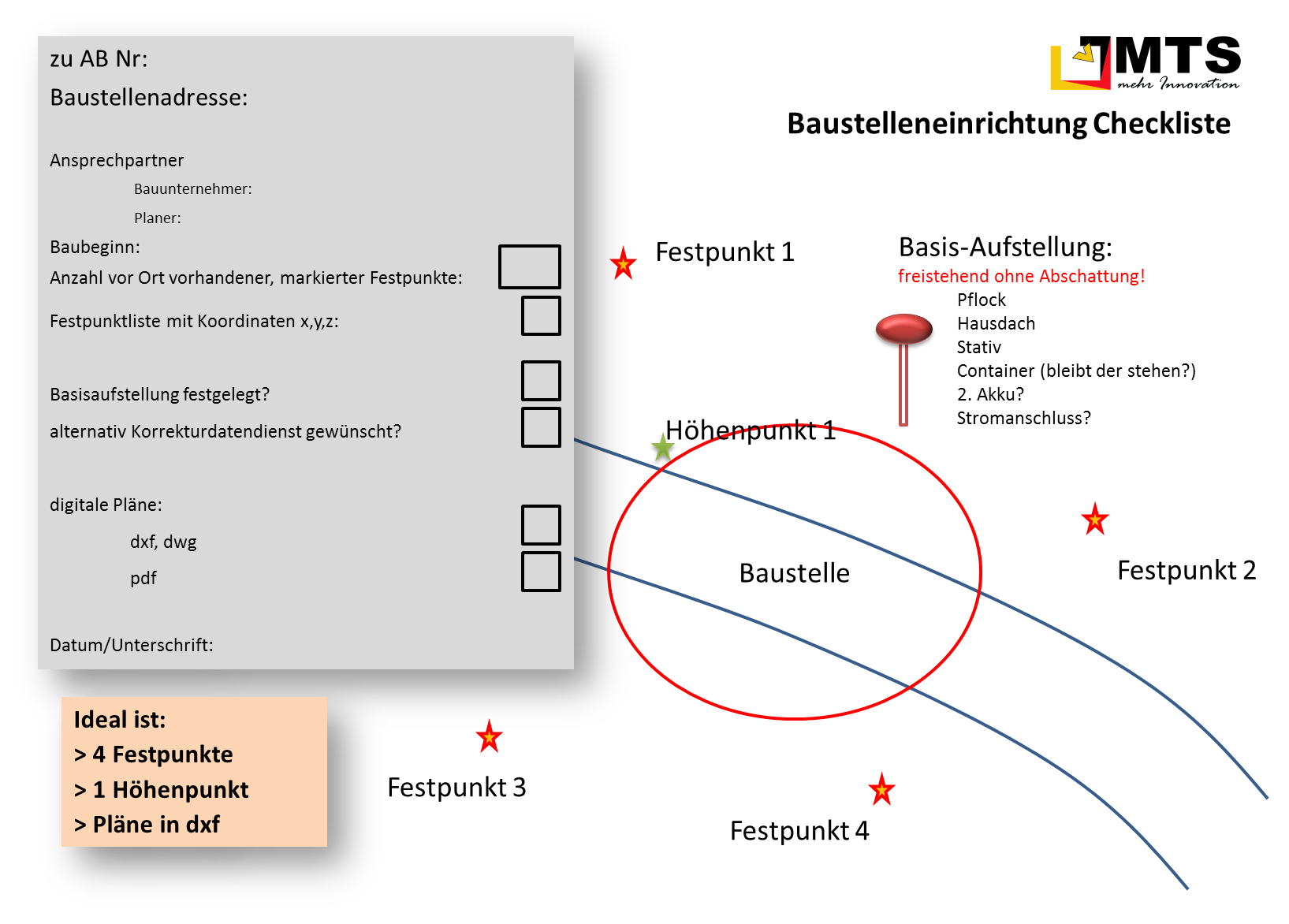 Image Added Image Added
|
Download BaustelleCheckliste.pdf
Download ganzes Dokument Baustelleneinrichtung-141014-0727-12.pdf
Sytemkomponenten und Software:
...
| Erweitern |
|---|
| title | Marktübliche Systeme |
|---|
|
MTS PilotMTS Navi für BaggerPanasonic Toughpad MTS Neigungssensoren MTS Receiverbox NavXperience GNSS-Antennen MTS Navi und MTS Geo für RoverPanasonic Toughpad Software MTS Navi und MTS Geo Ashtech ProMark oder andere GNSS-Antennen-Receiver-Kombination MTS Basis | ppm 20xx im geschlossenen Koffer mit Funkmodem und Bluetooth MTS BürosoftwareMTS MiniCAD Import und Export verschiedener Formate MTS CAD Datenerstellung und Bearbeitung | Leica GeosystemsLeica MaschinensteuerungLeica PowerGrade 3D für Raupen und Grader Leica PowerDigger 3D für Bagger Leica MPC1350 PowerGrade 3D Panel Leica GPS/GNSS PowerBox Receiver mit TCPS 27S mit Funkmodem Leica GPS/GNSS Antennas and boom/stick/bucket slope sensors Leica Basis/RoverLeica Redline PowerController oder CS25 Tablet Leica GeoPad software Leica PowerAntenna und GPS/GNSS PowerBox Receiver Leica BürosoftwareLeica Construction Office Datenaufbereitung, Verwaltung und Berechnung | Trimble Navigation und CaterpillarTrimble GCS900 (CAT Accugrade)Trimble CB430 oder CB460 Control Box Trimble/CAT MS99x GPS/GNSS Antennen oder MT900 Robotic Prisma Trimble/CAT SNR9x0 Machine Radios Trimble/CAT AS or RS400 Slope Sensors und PM400 Power Regulator Trimble/CAT AS450 Angle Sensors for excavators Trimble Base/RoversTrimble Tablet, TSC2 oder TSC3 SCS900 softwarre für Vermesser, Bauingenieure und BAuleiter Survey Controller für Vermesser SPS8xx GPS/GNSS Antennen und Receiver mit internem Funkmodem Trimble Office SoftwareSiteVision Office für Datenexport und Verwaltung Business Center – Heavy Construction Edition: Datenaufbereitung, Datenmanagement, Export | CarlsonCarlson Machine ControlCarlson Commander MC Control Box Carlson MC Pro Lite Dual Axis sensor Carlson MC Pro 500 or MC Pro Lite Dual GNSS Receiver Carlson Basis/RoverCarlson Surveyor or Carlson Supervisor Field Table Tablet data collector Carlson SurvCE oder SurvPC für Vermesser und Poliere Carlson MC Pr GS Smart GNSS Receiver Carlson Office SofwareCarlson Civil für Planung, Datenaufbereitung und Kalkulation Carlson TEkeoff für Angebotserstellung, Datenaufbereitung und Kalkulation | Topcon PositioningTopcon MaschinensteuerungTopcon 3D GPS für Grader und Raupen Topcon X63-GPS System für Bagger Topcon GX-60 Control Box Topcon MC-A1 GPS Antenne Topcon MC-R3 GPS Receiver mit internem Funkmodem Topcon 360° Neigungssensoren Topcon PZL-1 Positioning Zone Laser Transmitter und PZS-MC Positioning Zone Sensor Topcon Basis/RoverTopcon FC-25, FC-250, FC-2500 data collector TopSURV software Topcon HiperLite, Hiper II, oder GR-5 GPS Antenne mit internem Funkmodem Topcon BürosoftwareTopcon 3D-Office für Datenaufbereitung und Datenverwaltung SiteMaster für Vermessung, Datenaufbereitung und Datenverwaltung | Andere:ProlecDigpilotUbexiNovatron |
|
Vorgehen auf der Baustelle
...
- Passpunkte messen: Passpunkte sind in der Regel die Festpunkte aus vorigem Abschnitt. Es können grundsätzlich auch andere Punkte sein, die ausreichend genau in Koordinaten bestimmt sind.
- Die Passpunktmessung dauert 15 s bis 10 min je nach erforderlicher Genauigkeit
- Ab drei Passpunkten kann eine Abweichung berechnet und angezeigt werden. Besser sind 4 Passpunkte. Liegt die Lokalisierung nicht innerhalb der gewünschten Genauigkeit, müssen weitere Passpunkte gemessen werden und die "schlechten", fehlerbehafteten Punkte aus der Lokalisierung entfernt werden. Das kann nach Höhe und Lage getrennt geschehen. Z.B. kann ein abnivellierter Schachtdeckel ein guter Höhenpasspunkt sein, aber mit großen Lagefehlern. In diesem Fall wird er nur aus der Lageberechnung ausgeklickt.
- Vordefinierte Transformationsparameter können die Passpunktmessung ersetzen. Bedingung: Vermessungstechnische Kenntnisse. Die Prüfung an einem bekannten Punkt ist trotzdem obligatorisch!
- Keine Mehrfach-Lokalisierung. Falls aus irgendwelchen Gründen die Baustelle doch mehrfach lokalisiert wird, ist äusserste Sorgfalt darauf zu verwenden, dass die ungültige dokumentiert und dann auf allen Maschinen und Rovern gelöscht wird. Vor der Änderung gemessene Rohdatensätze beziehen sich auf die vorige Kalibrierung, müssen gekennzeichnet werden und dürfen nicht mit der neuen Lokalisierung erneut eingelesen werden. In lokalen Koordinaten gemessene Daten können weiter im Rechner verwendet werden.
Zerstörung und Verschiebung der Basis: auch hier nach Möglichkeit keine neue Lokalisierung!
...