Checkliste:
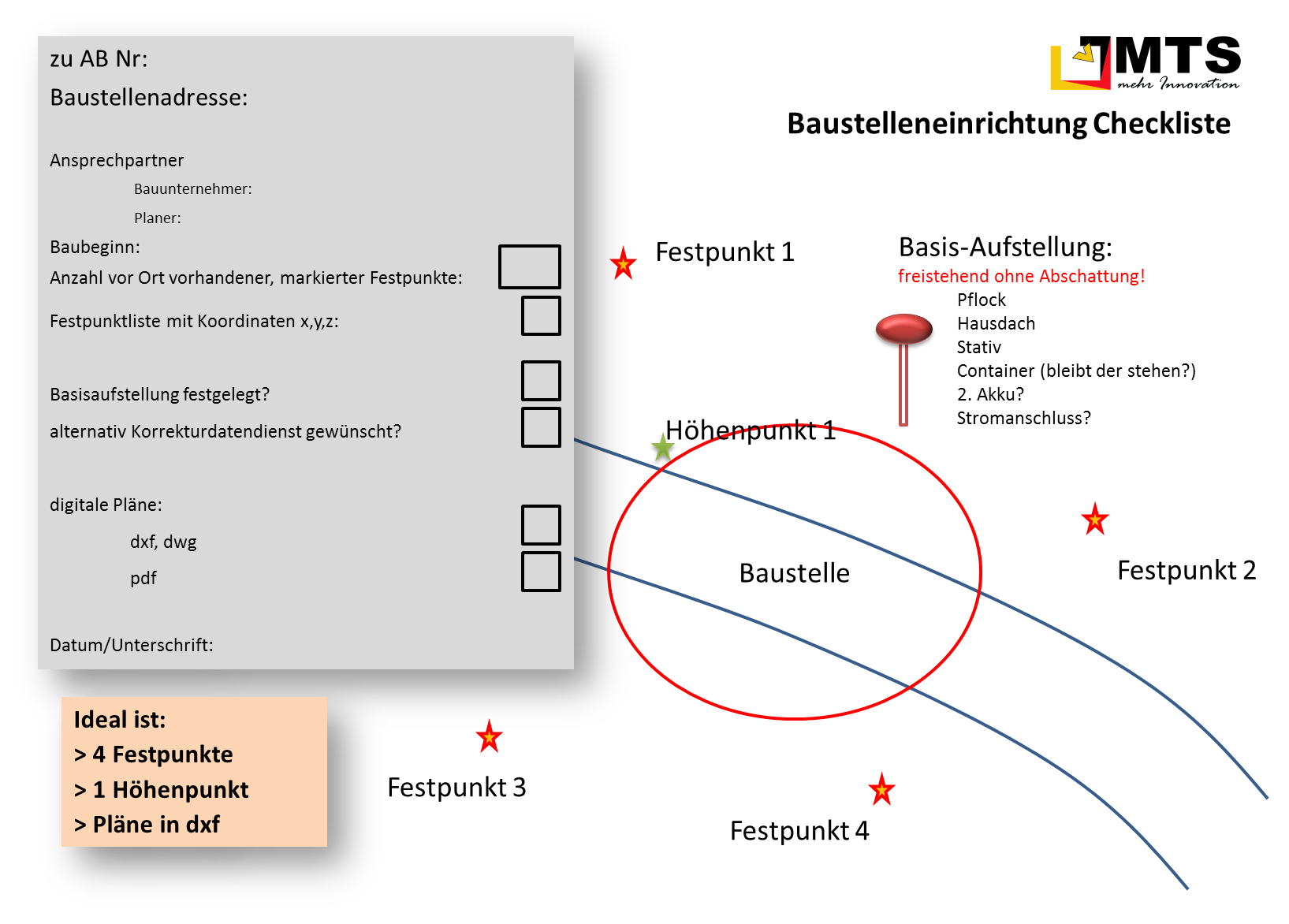
Download BaustelleCheckliste.pdf
Download ganzes Dokument Baustelleneinrichtung-141014-0727-12.pdf
Sytemkomponenten und Software:
Alle Systeme haben dieselben Grundlagen bezüglich Infrastruktur und Empfänger
Infrastruktur:
- Basisstation (Referenzempfänger)
- Funkmodem zur Übermittlung der Korrekturdaten zu den Maschinen und Rovern
- alternativ: Korrekturdatendienst via Internet (NTRIP)
Maschinen:
- Rechner oder Anzeigedisplay in der Kabine,
- GNSS-Antennen, Receiver
- Funkmodem, Neigungssensoren
- Kabelbaum und bei automatischen Steuerungen Sensoren an den hydraulischen Ventilen
Rover:
- Feldrechner (im Fall MTS-Navi identisch mit Baggerrechner),
- GNSS-Antennen und -receiver,
- Funkmodem.
- Im Regelfall wird der Feldrechner mittels Bluetooth mit dem Empfänger verbunden.
Vorgehen auf der Baustelle
Festpunkte festlegen (Absprache mit Planer, Ortsbegehung mit Markierfarbe):
Die Festpunkte müssen auffindbar und dauerhaft markiert sein. Sind die Festpunkte durch die Baumaßnahme in Gefahr, sollten unmittelbar nach der Lokalisierung (s.u.) weitere Kontrollpunkte gesetzt werden, die die Baumaßnahme sicher überdauern. Idealerweise werden die bereits vom Planer verwendeten Festpunkte übernommen.
- 5 bis 8 Lagefestpunkte gut um die Baustelle herum verteilt sind ideal.
- 1 oder 2 Lagefestpunkte im Zentrum sind für kleine Bauvorhaben auch gut, allerdings muss dann sichergestellt sein, dass das lokale Koordinatensystem genau nach N ausgerichtet ist.
- 1 Höhenfestpunkt reicht aus. Mehrere sind vorteilhaft. Wird Trimble SCS900 verwendet, sollen nicht genau 3 Höhenpunkte verwendet werden, sondern 1,2, 4 oder mehr!. Bei MTS-Navi spielt das keine Rolle.
- Die Höhe des Höhenfestpunktes muss exakt bestimmt sein. Eine GPS-Messung reicht nicht aus (Nivellement, Tachymeter).
- Die Festpunkte müssen ungehinderten Blick auf den Himmel zulassen
- Es muss möglich sein, den Roverstab auf den Festpunkt aufzuhalten
Basisstation aufbauen:
- für Pflock etc... und Stromanschluss sorgen
- Der Platz für die Basisstation sollte ungestört ausserhalb des Baustellenverkehrs sein
- Ausreichend Sicht auf den Himmel (höchster Punkt der Baustelle, auf einem Gebäude oder windfester Mast)
- Setzungs- und verschiebungssicherer Platz. Dreibeinstative nur für sehr kurzfristige Einsätze verwenden
- Basisposition in WGS84-Koordinaten notieren
- Antennenhöhe notieren
- Funkfrequenz, Funkprotokoll und Korrekturdatenformat notieren
- Vorsicht mit mehreren Basisstationen auf einer Baustelle! Störungen sind trotz verschiedener Funkfrequenzen möglich.
Vorsicht: Der Baucontainer kann sich im losen Boden setzen oder er wird unbemerkt verschoben - oder wird gegen Ende der Baustelle zu früh abgebaut! Nicht der optimale Platz für die Basis.
Lokalisierung messen /Baustelle kalibrieren (Die größte Herausforderung bei der Baustelleneinrichtung und der wichtigste Part)
- Passpunkte messen: Passpunkte sind in der Regel die Festpunkte aus vorigem Abschnitt. Es können grundsätzlich auch andere Punkte sein, die ausreichend genau in Koordinaten bestimmt sind.
- Die Passpunktmessung dauert 15 s bis 10 min je nach erforderlicher Genauigkeit
- Ab drei Passpunkten kann eine Abweichung berechnet und angezeigt werden. Besser sind 4 Passpunkte. Liegt die Lokalisierung nicht innerhalb der gewünschten Genauigkeit, müssen weitere Passpunkte gemessen werden und die "schlechten", fehlerbehafteten Punkte aus der Lokalisierung entfernt werden. Das kann nach Höhe und Lage getrennt geschehen. Z.B. kann ein abnivellierter Schachtdeckel ein guter Höhenpasspunkt sein, aber mit großen Lagefehlern. In diesem Fall wird er nur aus der Lageberechnung ausgeklickt.
- Vordefinierte Transformationsparameter können die Passpunktmessung ersetzen. Bedingung: Vermessungstechnische Kenntnisse. Die Prüfung an einem bekannten Punkt ist trotzdem obligatorisch!
- Keine Mehrfach-Lokalisierung. Falls aus irgendwelchen Gründen die Baustelle doch mehrfach lokalisiert wird, ist äusserste Sorgfalt darauf zu verwenden, dass die ungültige dokumentiert und dann auf allen Maschinen und Rovern gelöscht wird. Vor der Änderung gemessene Rohdatensätze beziehen sich auf die vorige Kalibrierung, müssen gekennzeichnet werden und dürfen nicht mit der neuen Lokalisierung erneut eingelesen werden. In lokalen Koordinaten gemessene Daten können weiter im Rechner verwendet werden.
Zerstörung und Verschiebung der Basis: auch hier nach Möglichkeit keine neue Lokalisierung!
- Sofortige Wiederherstellung der alten Aufstellung falls möglich und reproduzierbar
- Provisorische Basis auf einem Festpunkt mittels Dreibein und Eingabe der Koordinaten des Festpunktes. Manche Basisreferenzempfänger ermöglichen es, der Basis die neuen lokalen Koordinaten zuzuweisen. Andere benötigen dafür die WGS84 Koordinaten! Mit den in den Lokalisierungsdateien gespeicherten Transromationsparametern lassen sich WGS84 Koordinaten i nlokale und umgekehrt umrechnen.
- neuen Basispflock aufstellen (wie bei "Basistation aufbauen" beschrieben) und mit dem Rover einmessen. Stabhöhe und Antennenhöhe beachten!
- Basis vom provisorischen Platz an den neuen Platz umbauen, Mit dem Rover prüfen, ob alles stimmt.
Tipp: Unmittelbar nach der Lokalisierung Kontrollpunkte ausserhalb der Baustelle abmarken und einmessen! Diese können gerade zum Ende einer Baustelle, wenn der größte Teil der Festpunkte zerstört ist und die Wahrscheinlichkeit der Störung des Basisstandortes besonders hoch ist, eine schnelle Hilfe sein.
Datenmanagement auf der Baustelle und im Büro:
Datenmanagement
- Ordnerstruktur standardisieren
- Datum im Dateinamen verwenden. Wird JJJJMMDD vorangestellt, stehen die aktuellen Daten immer beieinander. Wird der Dateiname vorangestellt, sind Änderungsstände einer Ursprungsdatei nachvollziehbar. Beide Strategien sind sinnvoll.
- Zentrale Datenablage, am besten von überall zugänglich (Cloud etc...).
- Automatische Synchronisierung
- ist sinnvoll, wenn sichergestellt ist, dass Dateien immer Namen, Datum und ggf Version oder Bearbeiter enthalten. Ein versehentliches Überschreiben neuerer mit älteren Daten ist so ausgeschlossen.
- minimiert Datenvolumen
- Verhindert die Verwendung veralteter Dateien
Achtung: Falsches Systemdatum auf Feldrechnern führt zu Datenverlust beim Synchronisieren! Betroffen sind in erster Linie draussen gemessene Daten.
Datenprüfung:
- DGM in 3D-Viewer von allen Seiten betrachten.
- Typische Fehler: Sprünge an den Schnittstellen von Daten verschiedener Herkunft (insb. Trassen), "Trichter" (= meistens Elemente ohne Höhe mitvermascht)
- Keine Änderung an den im DGM verwendeten Punkten vornehmen (Verantwortung liegt beim Planer) oder den Planer die Änderung freigeben lassen
- Fehlende Bruchkanten nacharbeiten. Bruchkanten sind einerseits baulich bedingt (Randsteine, Böschungskanten etc...), können aber auch notwendig werden, um die Vermaschung zu berichtigen ("Dreiecke tauschen")
- Schnittansicht ohne Überhöhung zeigt reale Gefälle
- Höhenlinien oder Wasserlauf berechnen zeigt Fehler in der Entwässerungsplanung auf (Pfützenbildung, Einlaufschächte nicht am richtigen Fleck)
Dateigrößen:
- DGM nicht größer als notwendig. Insbesondere umfangreiche Bestands-DGM, die über die eigentliche Baustelle weit hinausreichen, legen manchen Rechner lahm.
- DGM nicht enger vermaschen als notwendig. Für eine akkurate gerundete Geländedarstellung ist eine enge Vermaschung nur dort nötig, wo auch tatsächlich kleinräumige Strukturen sind.
- Faustregel: Knotenabstände zwischen 1 und 10 m:
- kleiner für kleine, extrem gewellte Baustellen
- größer für große, flache Baustelleun und für Straßen
- DXF-Pläne machen häufig Schwierigkeiten. Abhilfe:
- Alle Blöcke, Referenzen und Hatches "explodieren" oder "auflösen". Sie können von Maschinensteuerungen nicht gelesen und nicht verwendet werden, führen aber oft zu hoher Rechenzeit oder zum Absturz
- Vor der Übertragung auf Baggerrechner und Rover alle nicht benötigten Elemente löschen
- Nicht benötigte Layer vor dem Export ausblenden
- Trimble-Bagger verwenden die Höhe ausschliesslich aus dem DGM, so eines vorhanden ist. In diesem Fall Pläne nur 2D verwenden.
- Trimble-Bagger ohne DGM können 3D-Linien verwenden.
- MTS Navi lässt den Nutzer wählen, ob die Höhe aus dem DGM oder aus der dxf verwendet werden soll. Hier sind möglichst vollständige und korrekte 3D-Pläne vorteilhaft.
- Polylinien mit Knoten an Bögen und Knicken sind besser als einzelne, nicht verbundene Linien
- durchgezogene Linienstile einsetzen
- Einheitliche Layerbezeichnungen verwenden
Datenübertragung
- zip-Ordner und download über z.B. ftp-server verwenden: minimiert das Risiko durch die email-Übertragung beschädigter Dateien
- eigene ftp-server
- DropBox
- RapidShare
- microsoft Share Point
- Topcon Sitelink
- Trimble Connected Community
- Datenvolumen auf dem Feld - oder Maschinenrechner gering halten. Insbesondere die Trimble TSC2-Rechner werden sehr langsam wenn viele Daten gespeichert sind.
- Kabel - oder USB-Stick - Übertragung gegenüber Funkübertragung bevorzugen. Es geht schneller und sicherer.
- Benutzergruppen einrichten: Bei großen und unübeischtlichen Bauvorhaben: Sicherstellen dass nur die automatische Benachrichtigung nur bei relevanten Daten aktiviert ist. Die 400ste Revision der Kücheneinrichtung interessiert den Bauleiter Tiefbau nicht.
Tipp: Den Empfänger der Daten über Art und Inhalt der neuen Daten informieren. Ein snapshot, ein Planausdruck oder ein Foto ergänzt digitale Planänderungen anschaulich. Die manuelle, persönliche Übergabe mittels USB-Stick ist die sicherste Art, einem Geräteführer oder Polier Planänderungen zu vermitteln.
(Fern-)wartung
- remote-Zugriff auf die Baggerrechner löst Mißverständnisse schnell und sicher (Datenschutz und Privatsphäre der Maschinenführer beachten!)
- Teamviewer o.ä. ermöglicht den Blick auf den Baggerrechner
- Maschinendaten zentral verwalten.
- regelmässige Sicherungen der Feldrechner